Our team, The Iron Mustangs (#3711), competed in the Portland Regional for the last two years and returned champions. This year we came in third. Given that this is also our third year participating in FIRST, I’d say that we’ve had a good run so far. In fact, the season isn’t over yet. We are still planning to compete in the Ellensburg Regional starting on 20 March 2013.

Ultimate Ascent
The organizers of the FIRST Robotics Competition (FRC) decided to a throw a curve ball this year. All FRC games involve an autonomous period, followed by a tele-op (remote control) period. The end of the tele-op period requires that the students make their robots perform a special task. In 2011 this task involved deploying a pole-climbing mini-robot. Last year, they had to balance on a hinged bridge. This year, the robots were required to CLIMB a metal pyramid, thus the name “Ultimate Ascent”. This YouTube video details the phases and rules of the game. These competitions are designed to simulate an actual engineering environment, where a small team is required to solve a design challenge within budget and on time. The design challenges can be formidable and this year was no exception!
Design Philosophies and Our Approach
Strategy is a critical component of FRC, both on the field and during the design phase. This year, designers typically chose one of three approaches. A few focused just on climbing for a guaranteed 30-point ascent. Some decided to forgo climbing altogether and focus just on shooting discs accurately. Many tried to incorporate both point scoring methods, providing their robot with both a shooting and climbing mechanism. These design philosophies were reflected in each robot on display in the pit, a designated staging area in the basement of the Veterans Memorial Coliseum where the regional is held. One walk around the pit showed that almost every robot focused on shooting with climbing as an afterthought. I believe the most successful robots were what I call “camperbots”, the term “camper” borrowed from first person gaming. A camper is essentially a player who remains stationary near a regenerating resource (such as ammo or health) and takes pot shots at other players. In Ultimate Ascent, camperbots would simply dock with the disc feeding station and fire their discs across the field as quickly as they could be fed. These robots could score more points in a minute than a climberbot could in the entire match. The 2013 Portland Regional champion was led by a team with an undefeated camperbot.

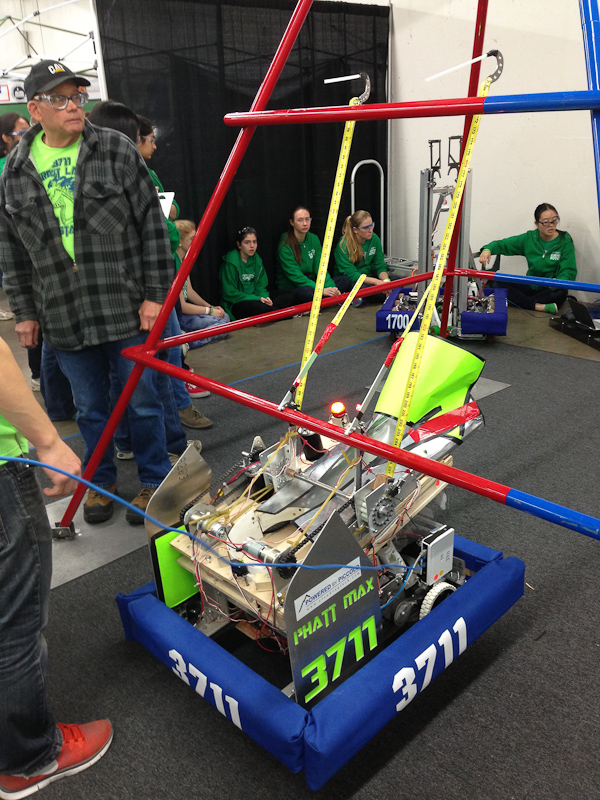
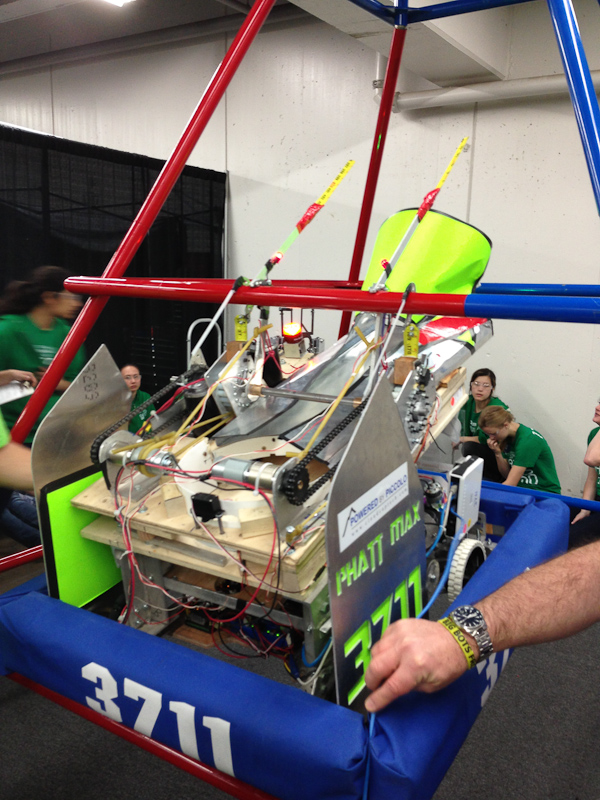
Our robot was an attempt to blend the two strategies in a hybrid mobile shooter and climber. We decided early on that our contribution would be valuable if we could score disc points during autonomous/tele-op and seal the match with a strong closer, much as we had done the past two years. To this end we built a linear shooting mechanism using two drive wheels and a gravity-fed magazine. As I demonstrated in previous posts, we could fling discs across the field accurately and this gave us a false sense of security as we neglected the shooting mechanism in favor of building a solid climber. Our initial approach to climbing involved moving up the legs of the pyramid rather than the side. We decided to abandon this approach during the final week of the build season due to technical limitations that we were unable to resolve. Instead, our mechanical design team invented an innovative and completely unique climbing mechanism that relied on retractable tape measures to grapple and climb the side of the pyramid. In theory, our robot would use hooks affixed to the chassis to hang on the first tier of the three-tiered pyramid and then extend the tape measure hooks to grab and pull the robot up to the second tier. We used Fatmax brand tape measures in our robot, thus the name Phatt Max was bestowed upon our bot.


Qualification at the Portland Regional
 When we arrived at the Portland Regional, we had technical issues from the beginning that severely hindered our performance and standing in the qualification matches. Our climbing mechanism broke at one point, requiring us to spend time in between matches repairing it. As a mechanical system, our climber is somewhat decoupled from the control of our operators, relying instead on tension and departure angle in order to climb successfully. This required us to adjust the climbing mechanism multiple times in order to mechanically tune it. We were able to reliably climb one tier for a 10-point hang using just the chassis hooks, but only once did we attempt (successfully) to climb to the second tier.
When we arrived at the Portland Regional, we had technical issues from the beginning that severely hindered our performance and standing in the qualification matches. Our climbing mechanism broke at one point, requiring us to spend time in between matches repairing it. As a mechanical system, our climber is somewhat decoupled from the control of our operators, relying instead on tension and departure angle in order to climb successfully. This required us to adjust the climbing mechanism multiple times in order to mechanically tune it. We were able to reliably climb one tier for a 10-point hang using just the chassis hooks, but only once did we attempt (successfully) to climb to the second tier.
 The discs used in the competition are similar to Frisbees. Because they are not flat underneath, they have a tendency to slip in front of one another. This caused our feed mechanism to jam, preventing us from scoring any shooting points. Our early qualification matches suffered greatly because of repeated jamming that we were unable to mitigate by tweaking the magazine. We tried using thin strips of tape measure metal to provide resistance to discs but the tweak was not reliable. By our 4th qualification match I realized we were in serious trouble and in danger of not making it to elimination. Once I got the green light from our team captain, I rushed over to Remote Control Hobbies, an excellent RC/hobby store in Eastern Portland. They had a pair of Futaba 3004 servos and extended servo arms in stock, so I bought them up and rushed back.
The discs used in the competition are similar to Frisbees. Because they are not flat underneath, they have a tendency to slip in front of one another. This caused our feed mechanism to jam, preventing us from scoring any shooting points. Our early qualification matches suffered greatly because of repeated jamming that we were unable to mitigate by tweaking the magazine. We tried using thin strips of tape measure metal to provide resistance to discs but the tweak was not reliable. By our 4th qualification match I realized we were in serious trouble and in danger of not making it to elimination. Once I got the green light from our team captain, I rushed over to Remote Control Hobbies, an excellent RC/hobby store in Eastern Portland. They had a pair of Futaba 3004 servos and extended servo arms in stock, so I bought them up and rushed back.

A servo is a type of motor, commonly used in RC models, to actuate control surfaces. It accomplishes this by changing the location of its shaft in response to a pulse-width-modulated (PWM) control signal. Fortunately, our robot has a PWM output board and software library support for common RC servos. To prevent jamming, the servo was positioned to extend its “arm” to catch a disc before it fed. When the trigger was pulled, the loaded disc would fire and the servo arm would temporarily move to allow a new disc to feed and then retract to catch the next disc. In between matches we installed the servo and whipped up some code to enable it. After that our feed mechanism was reliable and we started scoring points and winning matches.
Between our improved shooting capability and our demonstration of a 20-point, second tier climb in the final qualification match, the top teams took notice of us. The top eight teams are allowed to pick two alliance members to compete in the elimination matches. We were picked by Team 360, who helped us win the regional for the last two years. Joining us was Team 1425, who had built a very capable camperbot. Our alliance made it to the semi finals, but unfortunately, we were not enough to beat the powerhouse that is Team 955. Match results from the 2013 Portland Regional are here.
Some Perspective
Team 3711 has approximately thirteen members and six mentors, two of whom work as professional engineers. Many of the teams we competed against have fifty or more students and more professional engineers than my entire company. Consider also that many of these teams have been competing in FRC for many more than three years and have reliable and sizable sources of funding. Every time we compete in Portland we are competing against robotics titans and the odds are stacked against us. Still, we’ve won the regional twice and we forged a reputation through our simple but effective design philosophy and innovative tactics. While winning championships is exciting, our greatest accomplishment is the fact that almost all of the students that have participated in our FRC program are in or are preparing to attend engineering school. Because of this, I’d say ours is the most successful robotics program in the region.



